XE TỰ HÀNH AGV – HƯỚNG DẪN THIẾT KẾ VÀ LẬP TRÌNH
27/10/2022 12:37
Xe tự hành AGV – Automated Guided Vehicles ngày càng được ứng dụng rộng rãi để tự động hóa quy trình giao nhận vật tư. Đồng thời, AGV cũng hỗ trợ số hóa dữ liệu cho kho thông minh. Với các ưu điểm như:
Tuy nhiên, vẫn còn một rào cản là chi phí đầu tư ban đầu lớn. Do đó, nhiều doanh nghiệp quy mô vừa chưa thế áp dụng được AGV cho nhà máy của mình.
Trong bài này, Unifee sẽ trình bày một cách sơ bộ làm như thế nào để thiết kế và lắp ráp một xe AGV cơ bản. Từ đó, các doanh nghiệp có nguồn lực kỹ thuật tại chỗ có thể xây dựng AGV cho riêng mình với chi phí tối ưu nhất.
Trước tiên bạn cần xác định loại AGV mà mình muốn làm là dạng gì. Theo Unifee, xe tự hành có thiết kế dạng kéo là dễ thực hiên nhất. Bạn có thể thực thi công AGV dạng kéo với 3 bánh. Thiết kế này gồm 2 bánh động lực và một bánh đa hướng xoay tự do. Phương pháp điều khiển hướng đi cho thiết kế bánh xe dạng này là sai lêch tốc độ giữa hai bánh động lực.
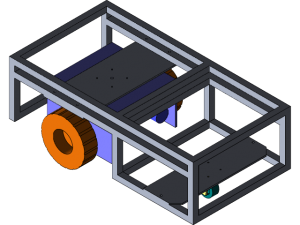 Thiết kế xe tự hành 3 bánh tham khảo (grabcad.com)
Thiết kế xe tự hành 3 bánh tham khảo (grabcad.com)
Khung sườn xe tự hành AGV cần đủ nhẹ để trọng lượng tự thân của nó không quá nặng nhưng phải đủ cứng để tải hoặc kéo hàng. Tùy theo tải trọng mà có thể chọn vật từ làm khung sườn.
Thiết kế khung xe cần tính đến vị trí để lắp đầy đủ các linh kiện cần thiết cho AGV. Các linh kiện tối thiếu cần có bao gồm: Motor và bánh xe động lực, cảm biến dò đường từ, mạch đọc RFID để định vị robot, mạch điều khiển (AGV controller), driver điều khiển motor, nguồn điện (bình acquy hoạc pin lithium), cảm biến an toàn.
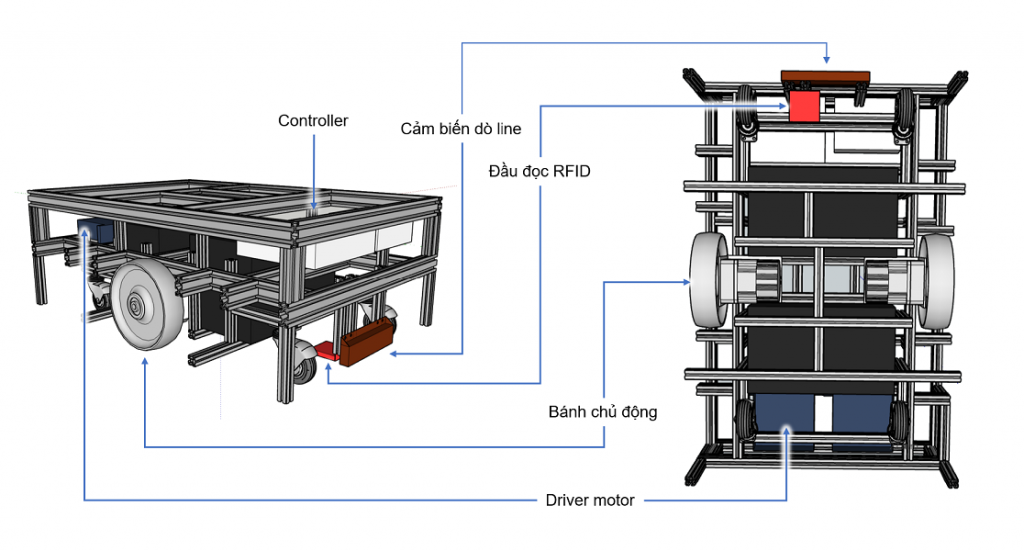 Bố trí các thiết bị trên AGV
Bố trí các thiết bị trên AGV
Loại động cơ được khuyến nghị sử dụng là động cơ DC không chổi than (Brushless DC motor – gọi tắt là BLDC). Vì đây là loại động cơ có nhiều đặc tính phù hợp cho AGV:
Khi lựa chọn motor cần tính toán kỹ công suất và moment xoắn của động cơ. Bởi vì ta phải đảm bảo motor đủ sức mạch kéo hàng và đạt vận tốc, gia tốc mong muốn.
Thông thường với tải nặng 200kg (bao gồm trong lượng xe) có thể sử dụng 2 động cơ 100W để vận hành. Nếu muốn tính toán chi tiết hơn, có thể tham khảo công cụ trên e-motionsupply.com
Lựa chọn bánh xe chủ động và hộp số phải đi đôi với nhau. Do nó ảnh hưởng đến moment xoắn đầu ra trên bánh xe và tốc độ tối đa của xe. Thông thường nên chọn hộp số có tỉ lệ truyền từ 25-50:1. Lý do là ở tỉ lệ truyền này thường sẽ có hộp số với đầu trục có khả năng chịu lực tốt. Khi lựa chọn các hộp số có chỉ số radial load cao thì ta có thể gắn bánh xe trực tiếp vào trục hộp số mà không cần thêm cơ cấu trợ lực nào.
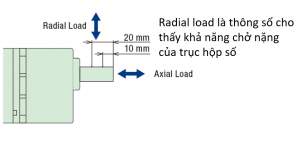 Lựa chọn hộp số cho xe tự hành AGV
Lựa chọn hộp số cho xe tự hành AGV
Đường kính bánh xe chủ động sẽ được tính sau khi có thông số của hộp số. Thông thường, nên thiết kế tốc độ tối đa của robot tầm 0.8m/s. Vì AGV dạng line từ không có các cảm biến an toàn bao quát hết không gian 3D (như camera 3D), nên đặt tốc độ tối đa 0.8m/s sẽ an toàn nếu không may xảy ra va chạm.
Ví dụ ta có động cơ BLDC với vòng quay tối đa 3.000 vòng/phút. hộp số tỉ lệ truyền 30:1.
Tốc độ trục quay tối đa của hộp số sẽ là:
V(out) = 3.000/30 = 100 vòng/phút.
Với bánh xe có đường kính D, vận tốc xe cần 0.8m/s = 48 m/phút, ta có:
3.14xDx100 = 48 ⇒ D = 0.152 m
Như vậy, ta có thể chọn bánh PU đường kính 150mm. Đây là loại bánh phổ biến trên thị trường.
Có thể sử dụng bất kỳ bộ điểu khiển khả trình nào để điều khiển AGV. Miễn là nó có đủ các ngõ I/O và các cổng kết nối với thiết bị trên AGV. Các loại mạch, module điều khiển phổ biến có thể dùng:
Cảm biến dò đường từ dùng trong AGV là kết hợp của 16 cảm biến Hall (hall sensor) với một IC vi xử lý. Hall sensor là một loại cảm biến từ tính. Nó được sử dụng để phát hiện cường độ và hướng của từ trường. Tín hiệu từ các cảm biến Hall được đưa về vi xử lý để lọc nhiễu. Sau đó, vi xử lý sẽ xuất tín hiệu về mạch điều khiển trung tâm của AGV.
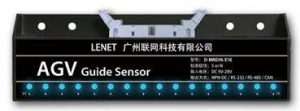 Cảm biến dò line từ cho AGV
Cảm biến dò line từ cho AGV
Trên thị trường, có nhiều nhà cung cấp cảm biến này. Có các tên tuối lớn như Sick, Panasonic, RoboteQ. Bên cạnh đó, cũng có các nhà sản xuất của Việt Nam và Trung Quốc. Để tiếc kiệm chi phí, có thể dùng cảm biến từ Trung Quốc. Tuy hơi khó cấu hình do giao diện phần mềm tiếng Trung nhưng giá thành phù hợp cho xe tự hành AGV chi phí thấp.
Cảm biến đường từ sẽ cho bộ xử lý trong tâm biết vị trí tương đối của nó so với đường từ. Ví dụ: đường từ đăng ở trung tâm của cảm biến, hoặc lệch trái hay lệch phải một khoảng nào đó. Thông thường, ta sử dụng cảm biến đường từ có 16 cảm biến Hall. Cảm biến như vậy được gọi là cảm biến dò line 16 bits.
Nguyên lý bám theo đường băng keo từ của AGV như sau:
Sau hoàn thành các bước trên, robot AGV đã có thể bám theo đường từ và… chạy không ngừng. Làm sao để AGV biết khi nào nên dừng, khi nào đổi hướng đi chuyển ….?
Trước đây, người ta dùng kỹ thuật đọc mã vạch 16 bits để ra lệnh cho AGV. Mã vạch được tạo ra bằng chính các đoạn băng kéo từ. Một đầu dò từ được lắp đặt để nhận diện các mã vạch này. AGV kết hợp tín hiệu giữa đầu do và tốc độ thực tế của xe để nhận biết các bit 0 và 1 của mã. Các lệnh như: dừng, rẽ, quay đầu… sẽ được quy định bởi một bộ mã lệnh được quy định trước.
Việc lập trình đọc mã vạch như trên khá phức tạp. Với tiến bộ của công nghệ RFID, AGV ngày này được định vị ra gửi lệnh thông qua mạch đọc RFID. Trên xe AGV sẽ được trang bị một đầu đọc RFID. Thẻ RFID được dán trên đường đi của AGV. Khi đọc được mã lệnh trong thẻ, AGV sẽ thực thi các lệnh có sẵn trong tập lệnh.
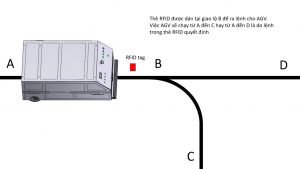 Tạo đường đi cho xe tự hành AGV
Tạo đường đi cho xe tự hành AGV
Như vậy, Unifee đã sơ lược lại một cách sơ bộ về các thiết kế xe tự hành AGV. Bao gồm các kiến thức cơ bản cũng như các điểm cần lưu ý. Hy vọng rằng các bạn có thể dựa vào đó thực hiện thành công một con AGV. Nếu có thắc mắc hoặc cần demo, đừng ngần ngại mà hãy gọi ngay cho chúng tôi.